1. What is Density-Based Spatial Clustering of Applications with Noise
DBSCAN (Density-based spatial clustering of applications with noise) uses density-based clustering among clustering algorithms.
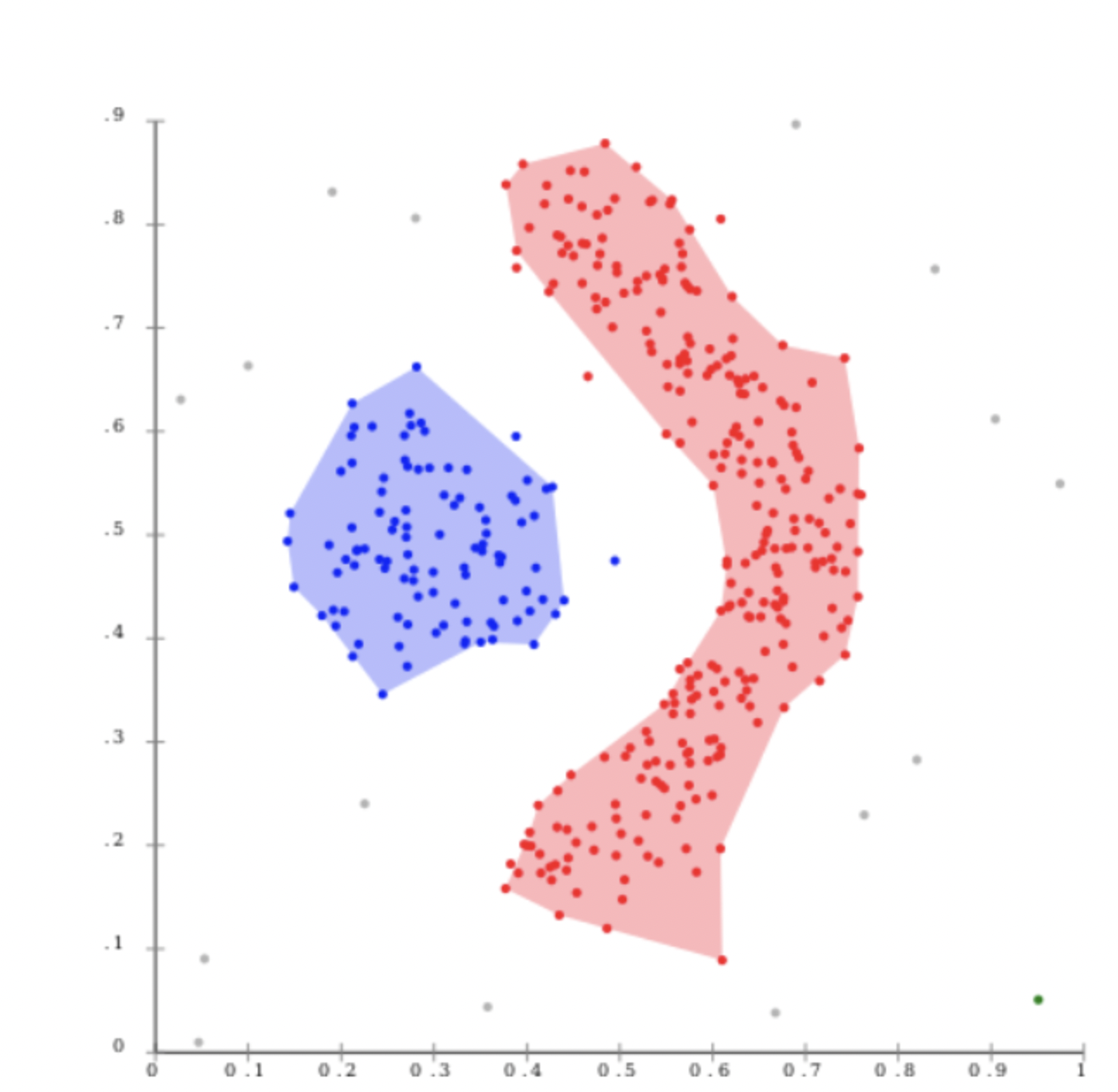
In the case of K-Means or Hierarchical clustering, clustering is performed using the distance between clusters. Density-based clustering is a method of clustering high-density parts because the dots are densely clustered.
To put it simply, if there are ‘n’(or more) points within a radius ‘x’ of a certain point, it is recognized as a single cluster.
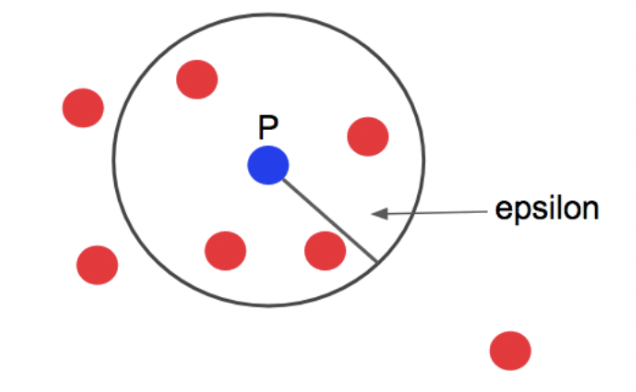
For example, suppose that there is a point ‘p’, and if there are ‘m’(minPts) points within a distance ‘e’(epsilon) from the point ‘p’, it is recognized as a cluster.
In this condition, that is, a point ‘p’ having ‘m’ points within a distance ‘e’ is called a core point.
To use the DBSCAN algorithm, the distance epsilon value from the reference point and the number of points(minPts) within this radius, should be passed as a factor.
In the figure below, if minPts = 4, if there are more than four points in the radius of epsilon around the blue point ‘P’, it can be judged as one cluster, and in the figure below ‘P’ becomes a core point because there are five points.
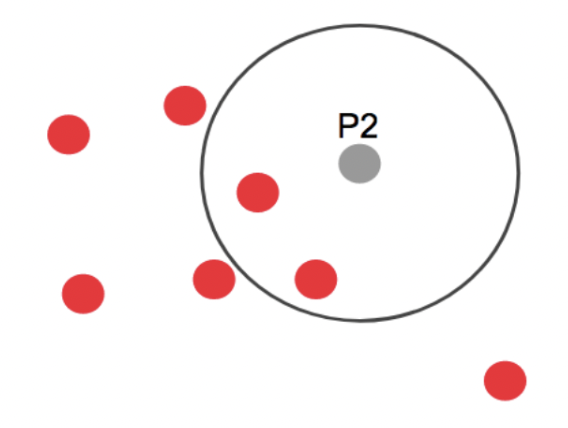
In the figure below, since the gray point P2 has three points within the epsilon radius based on the point P2, it does not reach minPts=4, so it does not become the core point of the cluster, but it is called a border point because it belongs to the cluster with the previous point P as the core point.
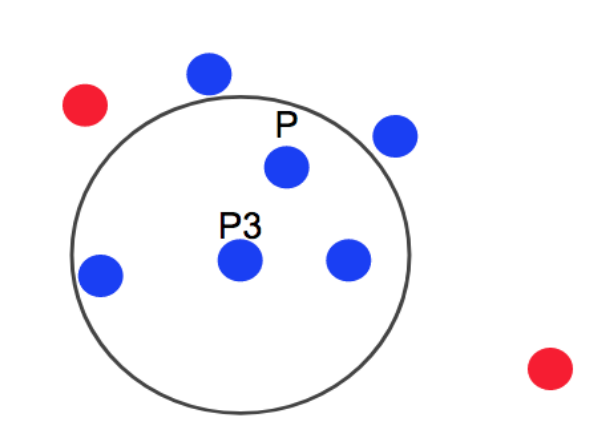
In the figure below, P3 becomes a core point because it has four points within the epsilon radius.
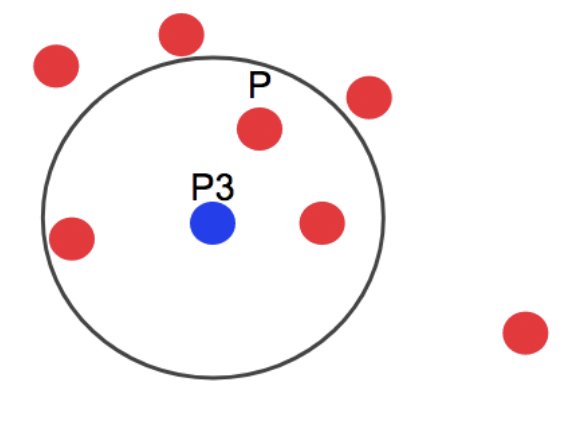
However, another core point P is included in the radius around P3, and in this case, core point P and P3 are considered to be connected and are grouped into one cluster.
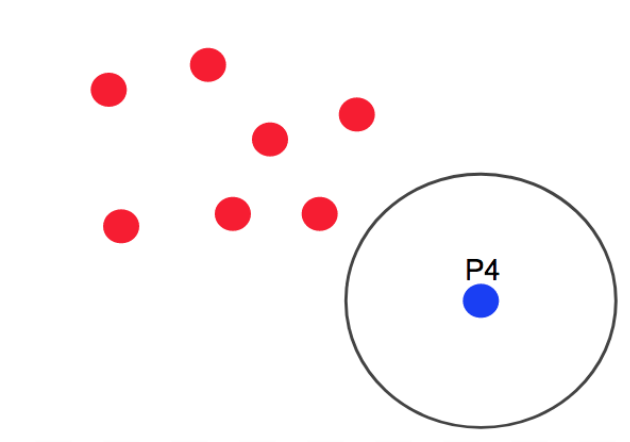
Finally, P4 in the figure below is not included in the range that satisfies minPts=4 no matter what point is centered. In other words, it becomes an outlier that does not belong to any cluster, which is called noise point.
Putting it all together, we get the following picture:
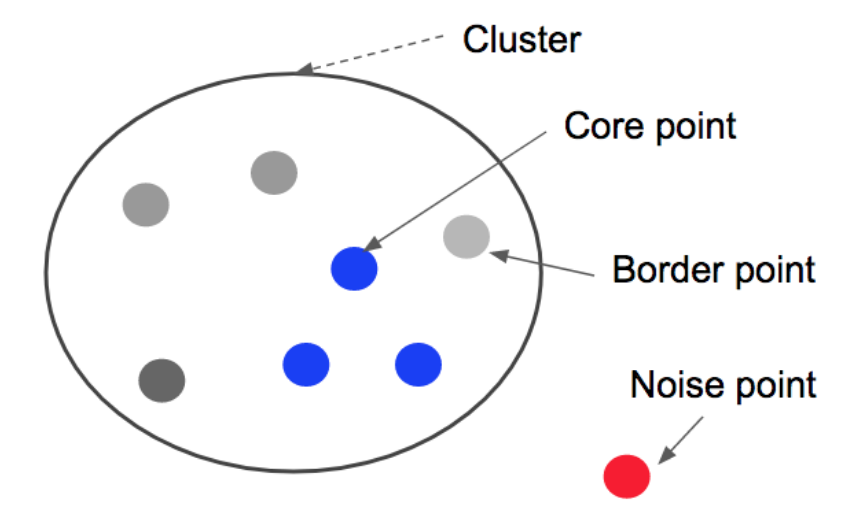
In summary, if there are more points than the number of minPts in the epsilon radius around a point, it becomes a cluster around that point, and that point is called a core point.
When a core point becomes part of a cluster of different core points, it became one big cluster.
A point belonging to a cluster but not a core point by itself is called a border point, and is mainly a point forming the outer edge of the cluster. A point that does not belong to any cluster becomes a noise point.
2. Key Points
The advantage of the DBSCAN algorithm is that it does not have to set the number of clusters like K Means, and because clusters are connected to each other according to the density of clusters, clusters with geometric shapes can be found well, and outlier detection is possible through noise point.
It is oftenly used for learning but not in the field → If it is small data, you can use it, but because there is a lot of data in the field, use efficiency is low.